Search can be for two different things:
- Search/Planning: Finding sequences of actions
- The path to the goal is the important thing
- Paths have various costs, deptsh
- Heuristics give problem-specific guidance
- Identification: Assignments to variables
- The goal itself is more important, not the path
- All paths at the same depth (for some formulations)
Constraint Satisfaction Problems
- Standard Search Problems
- State is a “black box”: arbitrary data structure
- Goal test can be any function over states
- Constraint satisfaction problems (CSPs): a special subset of search problems
- State is defined by variables with values from a domain
- Goal test is a set of constraints specifying allowable combinations of values for subsets of variables
- Allows useful general-purpose algorithms with more power than standard search algorithms
CSP Example: Map Coloring
 Goal is to visualize different territories/regions. Each region should have different distinct colors. Kinda like 3-coloring from Algorithms
Goal is to visualize different territories/regions. Each region should have different distinct colors. Kinda like 3-coloring from Algorithms
- Variables: WA, NT, Q, NSW, V, SA, T (shorthand of the region names)
- Domain: D = { red, green, blue }
- Constraints:
- Implicit: WA =/= NT (regions next to each other shouldnt have the same color)
- Explicit: (WA, NT) { (red, green), (red, blue), … }
- Solutions are assignments satisfying all constraints e.g.
- {WA=red, NT=green, Q=red, NSW=green, V=red, SA=blue, T=green}
- There could be multiple solutions
CSP Example: Sudoku
- Objective is to fill the empty cells with numbers between 1 and 9
- Numbers can only appear once in each row, column and box
- Variables? Domain?
- Variables is the value in the jth cell of the ith row
- Domain
- Constraints
- Row Constraint:
- Column Constraint:
- Block Constraint:
Varieties of CSPs and Constraints
Variables
- Discrete Variables
- Finite domains (e.g., Boolean CSPs Boolean satisfiability)
- Domain size and number of variables means complete assignments
- Infinite domains (e.g. job scheduling, variables are start hours for each job)
- Linear constraints are solvable, nonlinear are undecidable
- Finite domains (e.g., Boolean CSPs Boolean satisfiability)
- Continuous variables (e.g. start precise times for Hubble Telescope observations)
- Linear constraints solvable in polynomial time by linear programming (LP) methods Constraints
- Unary constraints involve a single variable (equivalent to reducing domains) for example
- Binary constraints involve pairs of variables e.g.
- Higher order constraints involve 3 or more variables e.g. Sudoku row constraints
- Preferences (soft constraints)
- e.g. red is better than green
- Often representable by a cost for each variable assignment
- Gives constrained optimization problems
Constraint Graphs
- Binary cSP: each constraint relates (at most) two variables
- Binary constraint graph: nodes are variables, edges show constraints

- The edges really say “WA =/= NT” for example
- General purpose CSP algorithms use the graph structure to speed up search
- For example, Tasmania is an independent subproblem in the above graph
Solving CSPs
- What if we used standard search formulation for CSPs
- States defined by the vlaues assigned so far (i.e. partial assignments)
- Initial state; the empty assignment, {}
- Action (successor function): assign a value to an unassigned varaible
- Goal test: the current assignment is complete and satisfies all constraints
- However, these would result in very large search graphs where we check too many solutions, or don’t stop a solution early enough
- A naïve state space search has plenty of problems
- Backtracking Search
- The basic uninformed algorithm for solving CSPs
- Idea 1: One variable at a time
- Variable assignments are commutative, i.e. [WA = red then NT = green] is the same as [NT = green then WA = red]
- Fix ordering of variables and only consider assignmentsto a single variable at each step
- Idea 2: Check constraints as you go
- Incremental goal test i.e. consider only values which do not conflict previous assignments Might have to do some computation to check constraints
- Depth-first search with these two improvements is called bcaktracking search

- We don’t even branch down the path where both are red since it violates the constraint immediately
function backtracking-serach(csp) returns solution/failure
return recursive-backgracking({}, csp)
function recursive-backtracking(assignment, csp) returns solution/failure
if assignemnt is compelte then return assignment
var <- selected - unassigned-variable(variables[csp], assignemnt, csp)
for each value in order-domain-values(var, assignment, csp) do
if value is consistent with assignment given constraints[csp] then
add {var = value} to assignment
result <- recursive-backtracking(assignment, csp)
if result =/= failure then return result
remove {var = value} from assignemnt
return failure
Backtracking is DFS + variable ordering + fail on violation
- Improving Backtracking
- There are some general purpose ideas that can result in huge gains in speed
- Filtering
- Can we detect inevitable failure early?
- Ordering
- Which variable should be assigned next?
- In what order should its values be tried?
- Structure
- Can we exploit the problem structure?
- Filtering
- Keep track of domains for unassigned variables and cross off bad options
- Forward checking: cross offf values that violate a constraint when a value assignment is added to the existing assignment

- As soon as WA is red, we get rid of red from NT and SA cuz they cant be red ever, no need to even consider it
- If the domain of a variable is ever empty, we have a problem

Additional Heuristics
Ordering
In backtracking we have to select unassigned variables and loop through the order domain values. What order should we use for those?
- Ordering of variables - Minimum Remaining Values (MRV)
- Order the variables on the number of remaining values in its domain
- Also called the “most constrained variable”
- “Fail-fast” ordering: if a partial assignment will fail, let it fail as early as possible
- Degree heuristic
- What about the first variable we choose?
- Degree heuristic: select the variable that is involved in the largest number of constraints
- This will remove the most elements from the nearby domains
- Makes the largest number of other variables more “constrained” and enable early falilures indirectly
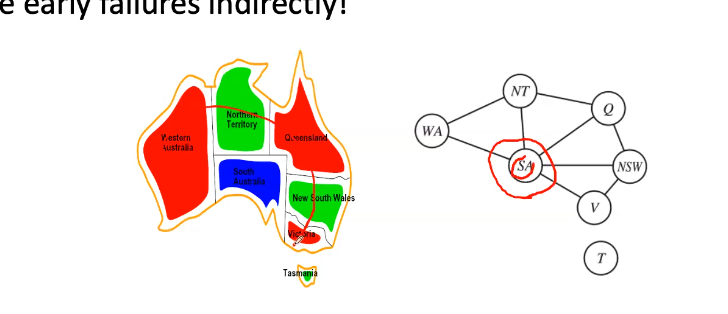
- Choose South Australia to start since it affects the most things
- Ordering the values - Least Constraining Value (LCV)
- Given a choice of variable, choose the least constraining value, i.e. the one that rules out the fewest values in the other unassigned variables
- May take some computation to determine this (e.g. rerun filtering)
Improving Backtracking
- Some general purpose ideas can result in huge gains in speed
- Filtering: Forward checking, constraint propagation, k-consistency
- Can we detect inevitable failure early?
- Ordering
- Which variable should be assigned next? MRV degree
- In what order should its values be tried? LCV
- Problem Structure
- Can we exploit the problem structure? Identify independent subproblems, leverage tree structures, cutset conditioning
Problem Structure
- Sometimes we can have independent CSP subproblems within our main problem
- Independent subproblems are identifiable as connected components of constraint graph
- Each subproblem can be solved independently
- Suppose a graph of variables with domain size can be broken into subproblems of only variables
- Without decomposing: worse case solution cost is
- With decomposing: linear in
Tree-Structured CSPs
- If the constraint graph has no loops (i.e. shows a tree structure) the CSP can ber solved in time
- Compare to general CSPs where the worst case time is
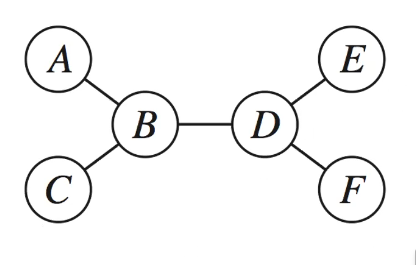
- Algorithm
- Order: Choose a root variable, order variables so that parents precede children
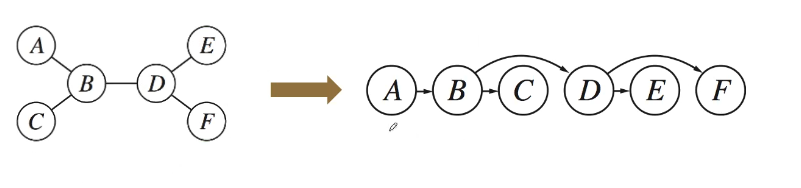
- Enforce arc consistency (e.g. using the AC-3 algorithm) from the leaf to the root
- Parent(X_i) -> X_i
- Runtime:
Nearly Tree-Structured CSPs
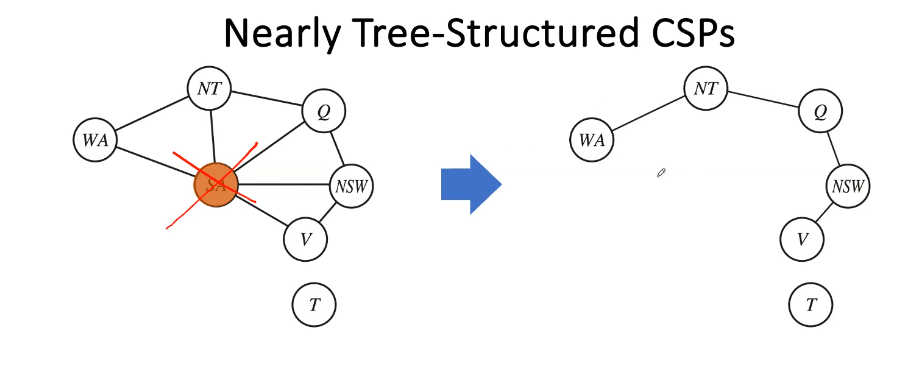
- Removing South Australia turns the subproblem in to a tree structure effectively
- Cutset: a set of variables such that after removing variables in this set and the constraints associated with the variables in this set, the constraint graph becomes a tree
- In the example above it’d be SA
- Cutset conditioning: instantiate (in all ways) the variables in the cutset, update the domains for the remaining variables, and solve the CSP subproblem represented by the remaining constraint tree
- When the number of variables in the cutset size is the worst case runtime is
- very fast for small
Iterative Algorithms for CSPs
- Local Search methods typically work with “complete” states, i.e. all variables are assigned
- To apply to CSPs
- Take an assignment with unsatisfied constraints
- Operators reassign variable values
- Algorithm sketch:
- While CSP is not solved; Variable selection: randomly select any conflicted variable Value selection: min-conflicts heuristic (choose a value that violates the fewest constraints) effectively hill climb with h(n) = total number of violated constraints